Site map :
Last upgrade to the site:
august 10th, 2002.
There has been

access to my Lego pages since creation.
This is an unofficial LEGO® web site.
LEGO® is a trademark of the LEGO® Group of companies
which does not sponsor, authorize or endorse this site.
You can visit the official LEGO website at: http://www.lego.com
Copyright 1996, 2000, Denis Cousineau
| | Lego Ants
Making an ant is probably the most difficult challenge. The robot must be solid, because the continuous shock of the legs on the floor impose a lot of stress on the joints. It must also be powerful so that its speed is reasonable, yet, this power must come in a light design. Further, gears must be counted, because friction among them greatly reduces the motor strength.
This page is devoted to show some of my attempts, along with the mistakes that I make along the process to design the perfect ant.
Design I
This is the first prototype. It was very strong, it could fall down the stairs without breaking apart. Sadly, this quality came with a cost: the weight. It was so heavy that it could barely walk. Another default is visible in the next picture: too many gears. 22 gears were used. Adding another motor didn’t changed anything, because it requires more gears to be installed.
 
Design II
This second design was aim at solving the gears and the weight problems.
Two motors are driving a single axle under the belly of the ant. Endless screws make the legs turn. It was a very light, and very simple design. And to make it more fancy, a piston can bent the front of the body, so that it can turn.
Again, this ant was slow motion. The endless screw slows down the speed too much
. Anyway, I used the old-style motors, which couldn’t tolerate going faster.

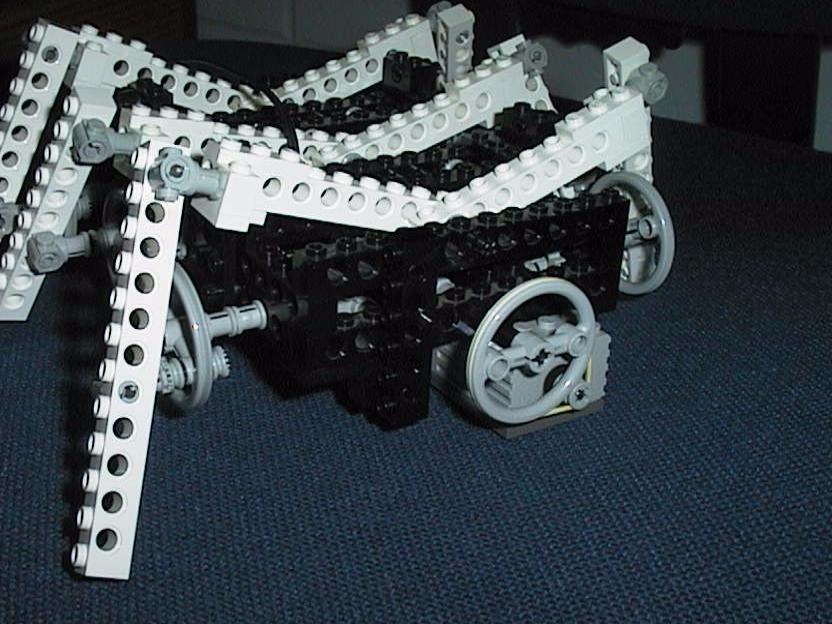
Design III
I the previous designs, legs are turning, making it go forward. In the following design, I tried to implement a more naturalistic walk. Each legs are moving with two motions: one motion is
proximo-distal: that is closer-farther from the body. The second is back-forth. Both motion combined makes a very realistic walking.
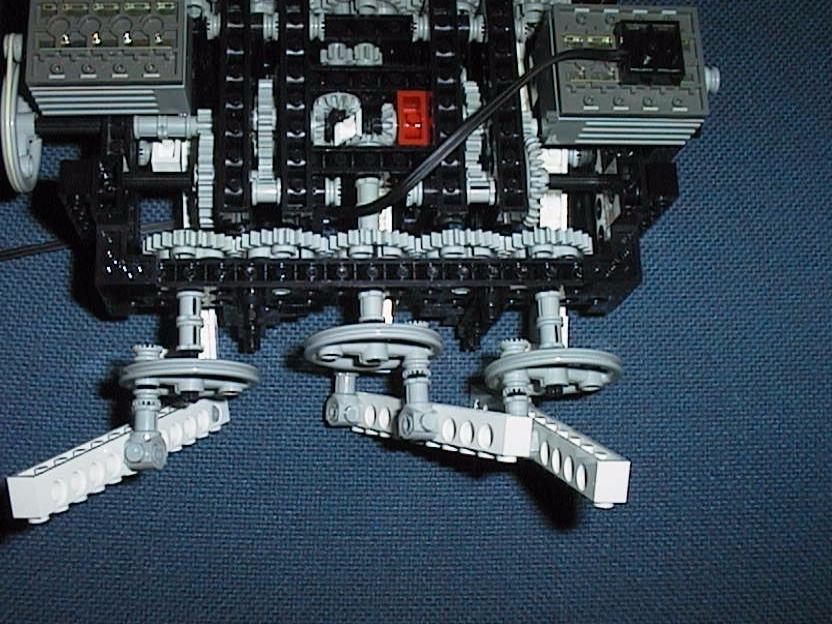
Further, I have been able to drive the motions using only one motors. In the following pictures, I connected two motors (using an early-junction technique). They are the new Lego motors, much more powerful, and therefore requiring less gears for speed reduction. As seen on the last picture, I used threads to tie together pieces linking the legs to the body. With that, the ant can walk even on carpets (otherwise, carpets are a real trap for the extremities of the legs).
  
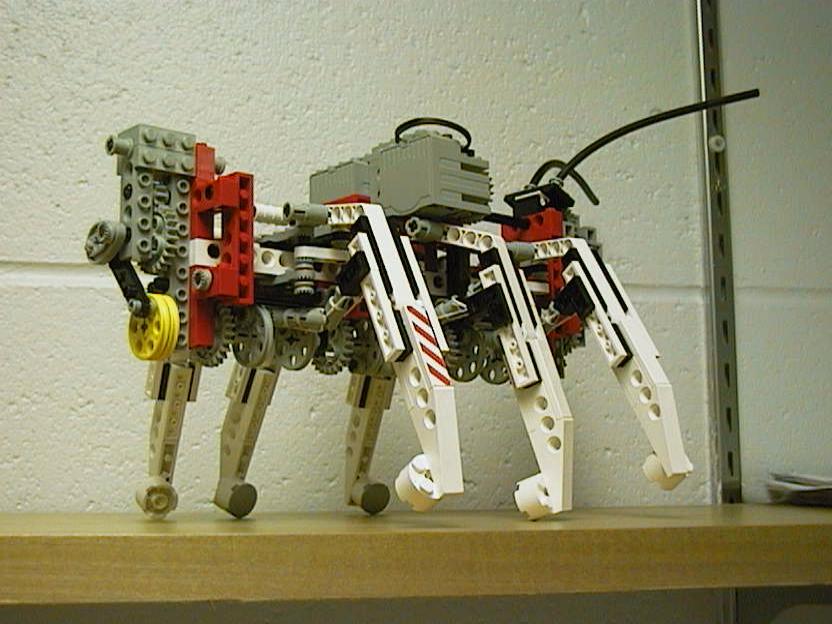
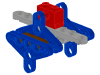
Design IV

This last design is a rationalization of the previous one. The mechanism is
exactly the same, except that the spine (the white beam located in the center
of design III) is removed. For you benefit, the LDRAW files are included below.
This way, you can see where the pieces are located.
ant_gear.dat ant_hold .dat
ant_leg.dat ant_skeleton.dat
ant.dat
|