|
|
Site map :
Last upgrade to the site:
There has been
This is an unofficial LEGO® web site. Copyright 1996, 2000, Denis Cousineau
|
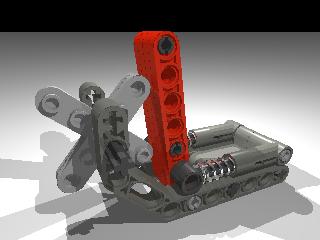
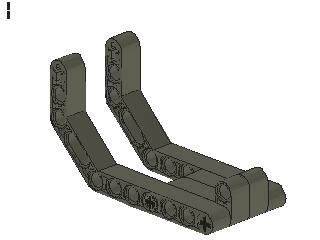
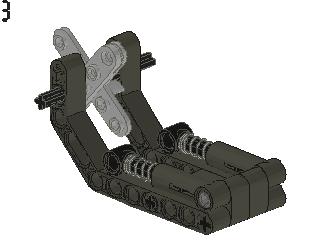
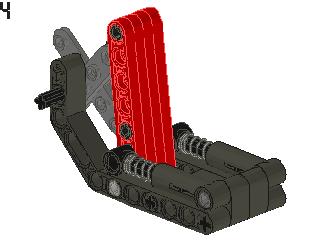
Stepper motorsSimple motors are highly inaccurate. If you need high precision, for example, in the angle turned by a motor, you cannot rely on DC motors such as those provided by Lego. The rotation sensor can help you, but then you need to use one sensor connected to a computer or the RCX. To solve this problem, engineers instead developed the "stepper motors", small motors that turn by a very small angle , always exactly the same angle, every times it is activated. In LEGO, it is possible to make a stepper motor as long as the desired angle of rotation is not too small. Here, I demonstrate one possible model with an angle of 45 degrees. Because they are very precise, you don't need sensors to supervise such a motor. You know that one impulsion will yield exactly, say, 45 degrees. Therefore, you can save one sensor. The basic idea is simply to put some pressure on a square so that it is not likely to stop turning at any angle. With the motor, you have to send an impulsion long enough to make more than half of the 45 degrees, but short enough not to do two turns (90 degrees). Instead of a square, I used a cross and shocks to put some pressure, but not too much. Here is one possible design:
You need to add a motor on one side of the axle that turns not too rapidly and has some power. LDRAW file: step.dat
|
|